-
1 работа под управлением ПК
работа под управлением ПК
Режим, когда принтер может выводить полученные данные.
[ http://www.morepc.ru/dict/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > работа под управлением ПК
-
2 работа под управлением монитора
работа под управлением монитора
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > работа под управлением монитора
-
3 работа под управлением ЭВМ
Makarov: on-line operationУниверсальный русско-английский словарь > работа под управлением ЭВМ
-
4 работа под управлением монитора
Information technology: monitor-controlled operationУниверсальный русско-английский словарь > работа под управлением монитора
-
5 работа в системе
1) Engineering: on-line operation2) Makarov: on-line mode (под управлением ЭВМ) -
6 автономная работа (принтера)
автономная работа
Режим работы принтера, когда он может получать данные, но не может печатать.
Если требуется печатать, надо переключить принтер в режим работы под управлением ПК (On line)
[ http://www.morepc.ru/dict/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > автономная работа (принтера)
-
7 с централизованным управлением
Русско-английский словарь по информационным технологиям > с централизованным управлением
-
8 протокол управления простой сетью
протокол управления простой сетью
Протокол, управляющий сетью, сетевыми устройствами и их функциями.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
простой протокол сетевого управления
Прикладной протокол (L7) управления сетевыми устройствами. Основное предназначение состоит в получении подробной информации о состоянии устройства и изменении его конфигурации в автоматическом режиме. Помимо периодического считывания SNMP-сервером информации с устройства, возможна активная сигнализация самим устройством о произошедших событиях.
[ http://www.morepc.ru/dict/]
простой протокол управления сетью
Протокол группы IETF по управлению сетью. Основной протокол администрирования сетей TCP/IP, обеспечивающий мониторинг и контроль сетевых устройств, обслуживание их конфигураций, сбор статистических данных, замеры производительности и проверку безопасности (МСЭ-Т Х.805; МСЭ-Т J.116).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Вопросы сетевого управления традиционно входят в число основных как для производителей программ и оборудования, так и для организаций, занимающихся разработкой стандартов. Невероятно высокий темп развития сетей на базе протокола TCP/IP (и Internet в частности) и движение в сторону создания единой информационной магистрали обусловили необходимость разработки стандартного протокола управления устройствами по сети и множества высокоуровневых продуктов, которые его используют.
Протокол управления сетями определяет стандартный метод контроля какого-либо устройства со станции управления с целью определения его состояния, настроек и иной информации, а также ее модификации. Основным протоколом управления, используемым в семействе TCP/IP, является протокол SNMP (Simple Network Management Protocol простой протокол управления сетью). Сам протокол очень прост: он определяет только иерархическое пространство имен объектов управления и способ чтения (или записи) данных этих объектов на каждом узле. Основное преимущество этого протокола заключается в том, что он позволяет единообразным образом управлять всеми типами аппаратных средств, независимо от их назначения и особенностей. Все они говорят на одном языке и могут опрашиваться и конфигурироваться с центральной станции.
Однако, SNMP не более чем протокол, поддерживающий диалог двух сторон. Для его использования необходимы две составляющие: программа-агент, работающая на сетевом устройстве, и программа-менеджер, позволяющая дистанционно отслеживать и управлять сетевыми устройствами. Способ ведения диалога между агентом и менеджером показан на рис.1.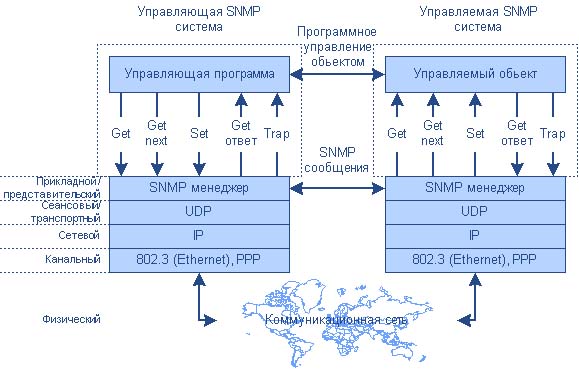
Рис. 1 Работа протокола SNMP в рамках модели OSI
Протокол SNMP традиционно используется для управления телекоммуникационным оборудованием. Для управления обычно применяются так называемые платформы сетевого управления, позволяющие осуществлять обнаружение устройств в сети, объединять модули управления оборудованием разных производителей, выполнять общие функции управления и оповещения. В число наиболее известных платформ сетевого управления входят HP OpenView (Hewlett-Packard), Solstice Domain Manager (Sun Microsystems), Tivoli NetView (Tivoli Systems), SNMPc (Castle Rock). Вместе с тем, управление с использованием SNMP может быть применено и для решения других задач в том числе для систем промышленного управления. Проиллюстрируем такой подход на реальном примере.
В ходе выполнения одного из экспортных контрактов корпорацией Стинс Коман была разработана, произведена и установлена на ТЭС Фалай (Вьетнам) система управления электрофильтром. Логически система была разделена на два уровня: нижний монтируемый в непосредственной близости от электрофильтра, и верхний осуществляющий сбор статистической информации и представляющий графически состояние всего объекта. От использования существующих SCADA-систем мы отказались из-за высокой стоимости пакета разработки и модулей времени выполнения, а также большого времени, необходимого на обучение разработчиков. Было решено пойти по пути собственной разработки. Связь между подсистемами верхнего и нижнего уровней была осуществлена традиционными для задач АСУ ТП методами. Из огромного количества используемых полевых протоколов был выбран один, наиболее подходящий по быстродействию и простоте реализации. Учитывая особенности этого протокола, был разработан программный комплекс, осуществляющий сбор информации, анализирующий статистику и графически представляющий состояние управляемого устройства.
Приступив к аналогичным работам по следующему контракту, мы постарались учесть уроки предыдущей разработки и при создании системы управления технологическими процессами воспользоваться нашим опытом проектирования больших сетевых комплексов. В новом варианте системы связь между уровнями осуществлялась по протоколу SNMP. В качестве программы верхнего уровня использовался описанный ниже универсальный SNMP-менеджер.
Использование принципов сетевого управления при создании систем управления технологическими процессами позволило избежать проблем, связанных с интеграцией различных уровней системы. Появился единый универсальный способ управления любым оборудованием, начиная от сетевого маршрутизатора и заканчивая электрофильтром. Для того чтобы появилась возможность управлять устройствами, которые ранее в принципе не подключались к сети, был разработан универсальный программно-аппаратный SNMP-агент eSCape. Это устройство построено на основе однокристального RISC-контроллера и для подключения к сети (локальной или территориально-распределенной) использует Ethernet или PPP. Оно обладает малым весом и невысокой стоимостью и предоставляет широкий выбор вариантов сопряжения с управляемым объектом.
При разработке системы промышленного управления, реализованной в виде SNMP-менеджера, изначально были сформулированы следующие требования:- новый программный продукт должен обеспечивать сбор и хранение статистических данных, которые должны легко импортироваться в другие программы;
- новый программный продукт должен работать как под управлением ОС MS Windows 9x/NT/2000, так и под управлением ОС Linux;
- новый программный продукт должен обеспечивать достаточное быстродействие на машинах бюджетного класса;
- для разработки программ рекомендуется использовать свободно распространяемые продукты с открытым исходным кодом.
В результате был разработан программный комплекс EscView, архитектура которого приведена на рис.2.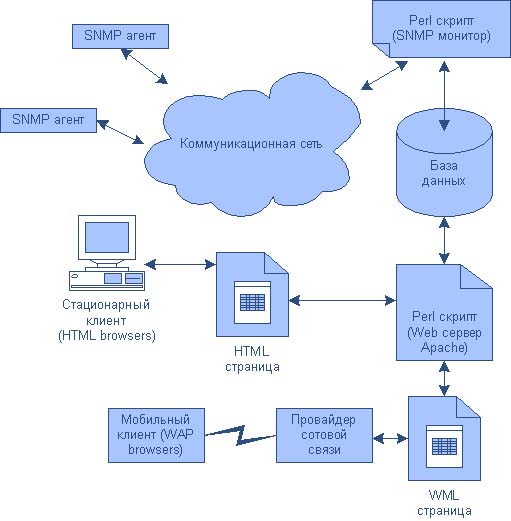
Рис.2 Программный комплекс, осуществляющий сбор информации, анализ статистики и графическое представление состояния управляемого устройства
Каждому управляемому устройству соответствует SNMP-агент, который может быть встроенным или внешним. SNMP-агенты, подключенные к сети протокола TCP/IP, периодически опрашиваются программой-монитором, которая написана на языке Perl. Периодичность и частота опроса, а также перечень интересующих SNMP-агентов записаны в базе данных, построенной на пакете программ MySQL. Все переменные, считанные в процессе опроса, сохраняются в базе данных. SNMP-агент может также сам проинформировать систему управления о том или ином изменении своего состояния. Для подачи команд устройствам необходимо изменить соответствующие поля базы данных. Все изменения, произошедшие в базе данных, адресно передаются SNMP-агентам.
Рис.3 Пример диалога с пользователем в формате HTML-страницы
Для реализации графического интерфейса пользователя используется HTTP-сервер Apache. Программа, написанная на языке Perl, поддерживает диалоги с пользователем и при помощи базы данных динамически формирует ответ в формате HTML-страницы или в формате WML-страницы.
Страницы HTML предназначены для пользователей, работающих с любым Internet-браузером (например, MS Internet Explorer или Netscape Navigator). Пример реального диалога представлен на рис.3. Страницы WML предназначены для мобильных устройств, поддерживающих протокол WAP (таким устройством может быть сотовый телефон). Для поддержки WAP-клиентов никаких специальных аппаратных доработок производить не надо: в качестве шлюза выступают ресурсы, штатно предоставляемые сотовыми операторами. Соединение между сотовым шлюзом и SNMP-менеджером осуществляется через Internet.
Данное решение может функционировать как под управлением ОС MS Windows 9x/NT/2000, так и под управлением ОС UNIX/Linux. Все программные продукты, используемые при разработке, распространяются свободно.
Описываемое решение уже используется для обслуживания мощных источников бесперебойного питания. В настоящее время на базе этого решения разрабатывается комплекс программ, предназначенных для управления электрофильтром. Оно, в частности, может использоваться для создания интеллектуальных зданий, для распределенного сбора информации с датчиков, а также для реализации заданного промышленного управления через типовые объединённые сети.
[ http://www.mka.ru/?p=40138]Тематики
Действия
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > протокол управления простой сетью
-
9 человеко-машинный интерфейс
- operator-machine communication
- MMI
- man-machine interface
- man-machine communication
- human-machine interface
- human-computer interface
- human interface device
- human interface
- HMI
- computer human interface
- CHI
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > человеко-машинный интерфейс
10 автоматическое повторное включение
- reclosure
- reclosing
- reclose
- autoreclosure
- autoreclosing
- automatic recluse
- automatic reclosing
- auto-reclosing
- ARC
- AR
автоматическое повторное включение
АПВ
Коммутационный цикл, при котором выключатель вслед за его отключением автоматически включается через установленный промежуток времени (О - tбт - В).
[ ГОСТ Р 52565-2006]
автоматическое повторное включение
АПВ
Автоматическое включение аварийно отключившегося элемента электрической сети
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
(автоматическое) повторное включение
АПВ
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]EN
automatic reclosing
automatic reclosing of a circuit-breaker associated with a faulted section of a network after an interval of time which permits that section to recover from a transient fault
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
auto-reclosing
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEC 62271-100, ed. 2.0 (2008-04)]
auto-reclosing (of a mechanical switching device)
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEV number 441-16-10]FR
réenclenchement automatique
refermeture du disjoncteur associé à une fraction de réseau affectée d'un défaut, par un dispositif automatique après un intervalle de temps permettant la disparition d'un défaut fugitif
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
refermeture automatique
séquence de manoeuvres par laquelle, à la suite d’une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEC 62271-100, ed. 2.0 (2008-04)]
refermeture automatique (d'un appareil mécanique de connexion)
séquence de manoeuvres par laquelle, à la suite d'une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEV number 441-16-10]
Автоматическое повторное включение (АПВ), быстрое автоматическое обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматического отключения; одно из наиболее эффективных средств противоаварийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрической системы. Во многих случаях после быстрого отключения участка электрической системы, на котором возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает. АПВ выполняется с помощью автоматических устройств, воздействующих на высоковольтные выключатели после их аварийного автоматического отключения от релейной защиты. Многие из этих автоматических устройств обеспечивают АПВ при самопроизвольном отключении выключателей, например при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т. п. Эффективность АПВ тем выше, чем быстрее следует оно за аварийным отключением, т. е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла АПВ. В электрических системах применяют однократное АПВ — с одним циклом, двукратное — при неуспешном первом цикле, и трёхкратное — с тремя последовательными циклами. Цикл АПВ — время от момента подачи сигнала на отключение до замыкания цепи главными контактами выключателя — состоит из времени отключения и включения выключателя и времени срабатывания устройства АПВ. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его главных контактов восстановил способность к отключению поврежденной цепи в случае неуспешного АПВ. Время деионизации зависит от среды, климатических условий и других факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов АПВ., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5—1,5 сек, 2-го — от 10 до 15 сек, 3-го — от 60 до 120 сек.
Наиболее распространено однократное АПВ, обеспечивающее на воздушных линиях высокого напряжения (110 кв и выше) до 86 %, а на кабельных линиях (3—10 кв) — до 55 % успешных включений. Двукратное АПВ обеспечивает во втором цикле до 15 % успешных включений. Третий цикл увеличивает число успешных включений всего на 3—5 %. На линиях электропередачи высокого напряжения (от 110 до 500 кВ) применяется однофазовое АПВ; при этом выключатели должны иметь отдельные приводы на каждой фазе.
Применение АПВ экономически выгодно, т. к. стоимость устройств АПВ и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии.
[ БСЭ]
НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ АПВ
Опыт эксплуатации сетей высокого напряжения показал, что если поврежденную линию электропередачи быстро отключить, т. е. снять с нее напряжение, то в большинстве случаев повреждение ликвидируется. При этом электрическая дуга, возникавшая в месте короткого замыкания (КЗ), не успевает вызвать существенных разрушений оборудования, препятствующих обратному включению линии под напряжение.
Самоустраняющиеся повреждения принято называть неустойчивыми. Такие повреждения возникают в результате грозовых перекрытий изоляции, схлестывания проводов при ветре и сбрасывании гололеда, падения деревьев, задевания проводов движущимися механизмами.
Данные о повреждаемости воздушных линий электропередачи (ВЛ) за многолетний период эксплуатации показывают, что доля неустойчивых повреждений весьма высока и составляет 50—90 %.
При ликвидации аварии оперативный персонал производит обычно опробование линии путем включения ее под напряжение, так как отыскание места повреждения на линии электропередачи путем ее обхода требует длительного времени, а многие повреждения носят неустойчивый характер. Эту операцию называют повторным включением.
Если КЗ самоустранилось, то линия, на которой произошло неустойчивое повреждение, при повторном включении остается в работе. Поэтому повторные включения при неустойчивых повреждениях принято называть успешными.
На ВЛ успешность повторного включения сильно зависит от номинального напряжения линий. На линиях ПО кВ и выше успешность повторного включения значительно выше, чем на ВЛ 6—35 кВ. Высокий процент успешных повторных включений в сетях высокого и сверхвысокого напряжения объясняется быстродействием релейной защиты (как правило, не более 0,1-0,15 с), большим сечением проводов и расстояний между ними, высокой механической прочностью опор. [Овчинников В. В., Автоматическое повторное включение. — М.:Энергоатомиздат, 1986.— 96 с: ил. — (Б-ка электромонтера; Вып. 587). Энергоатомиздат, 1986]
АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ (АПВ)
3.3.2. Устройства АПВ должны предусматриваться для быстрого восстановления питания потребителей или межсистемных и внутрисистемных связей путем автоматического включения выключателей, отключенных устройствами релейной защиты.
Должно предусматриваться автоматическое повторное включение:
1) воздушных и смешанных (кабельно-воздушных) линий всех типов напряжением выше 1 кВ. Отказ от применения АПВ должен быть в каждом отдельном случае обоснован. На кабельных линиях 35 кВ и ниже АПВ рекомендуется применять в случаях, когда оно может быть эффективным в связи со значительной вероятностью повреждений с образованием открытой дуги (например, наличие нескольких промежуточных сборок, питание по одной линии нескольких подстанций), а также с целью исправления неселективного действия защиты. Вопрос о применении АПВ на кабельных линиях 110 кВ и выше должен решаться при проектировании в каждом отдельном случае с учетом конкретных условий;
2) шин электростанций и подстанций (см. 3.3.24 и 3.3.25);
3) трансформаторов (см. 3.3.26);
4) ответственных электродвигателей, отключаемых для обеспечения самозапуска других электродвигателей (см. 3.3.38).
Для осуществления АПВ по п. 1-3 должны также предусматриваться устройства АПВ на обходных, шиносоединительных и секционных выключателях.
Допускается в целях экономии аппаратуры выполнение устройства группового АПВ на линиях, в первую очередь кабельных, и других присоединениях 6-10 кВ. При этом следует учитывать недостатки устройства группового АПВ, например возможность отказа в случае, если после отключения выключателя одного из присоединений отключение выключателя другого присоединения происходит до возврата устройства АПВ в исходное положение.
3.3.3. Устройства АПВ должны быть выполнены так, чтобы они не действовали при:
1) отключении выключателя персоналом дистанционно или при помощи телеуправления;
2) автоматическом отключении от релейной защиты непосредственно после включения персоналом дистанционно или при помощи телеуправления;
3) отключении выключателя защитой от внутренних повреждений трансформаторов и вращающихся машин, устройствами противоаварийной автоматики, а также в других случаях отключений выключателя, когда действие АПВ недопустимо. АПВ после действия АЧР (ЧАПВ) должно выполняться в соответствии с 3.3.81.
Устройства АПВ должны быть выполнены так, чтобы была исключена возможностью многократного включения на КЗ при любой неисправности в схеме устройства.
Устройства АПВ должны выполняться с автоматическим возвратом.
3.3.4. При применении АПВ должно, как правило, предусматриваться ускорение действия релейной защиты на случай неуспешного АПВ. Ускорение действия релейной защиты после неуспешного АПВ выполняется с помощью устройства ускорения после включения выключателя, которое, как правило, должно использоваться и при включении выключателя по другим причинам (от ключа управления, телеуправления или устройства АВР). При ускорении защиты после включения выключателя должны быть приняты меры против возможного отключения выключателя защитой под действием толчка тока при включении из-за неодновременного включения фаз выключателя.
Не следует ускорять защиты после включения выключателя, когда линия уже включена под напряжение другим своим выключателем (т. е. при наличии симметричного напряжения на линии).
Допускается не ускорять после АПВ действие защит линий 35 кВ и ниже, выполненных на переменном оперативном токе, если для этого требуется значительное усложнение защит и время их действия при металлическом КЗ вблизи места установки не превосходит 1,5 с.
3.3.5. Устройства трехфазного АПВ (ТАПВ) должны осуществляться преимущественно с пуском при несоответствии между ранее поданной оперативной командой и отключенным положением выключателя; допускается также пуск устройства АПВ от защиты.
3.3.6. Могут применяться, как правило, устройства ТАПВ однократного или двукратного действия (последнее - если это допустимо по условиям работы выключателя). Устройство ТАПВ двукратного действия рекомендуется принимать для воздушных линий, в особенности для одиночных с односторонним питанием. В сетях 35 кВ и ниже устройства ТАПВ двукратного действия рекомендуется применять в первую очередь для линий, не имеющих резервирования по сети.
В сетях с изолированной или компенсированной нейтралью, как правило, должна применяться блокировка второго цикла АПВ в случае замыкания на землю после АПВ первого цикла (например, по наличию напряжений нулевой последовательности). Выдержка времени ТАПВ во втором цикле должна быть не менее 15-20 с.
3.3.7. Для ускорения восстановления нормального режима работы электропередачи выдержка времени устройства ТАПВ (в особенности для первого цикла АПВ двукратного действия на линиях с односторонним питанием) должна приниматься минимально возможной с учетом времени погасания дуги и деионизации среды в месте повреждения, а также с учетом времени готовности выключателя и его привода к повторному включению.
Выдержка времени устройства ТАПВ на линии с двусторонним питанием должна выбираться также с учетом возможного неодновременного отключения повреждения с обоих концов линии; при этом время действия защит, предназначенных для дальнего резервирования, учитываться не должно. Допускается не учитывать разновременности отключения выключателей по концам линии, когда они отключаются в результате срабатывания высокочастотной защиты.
С целью повышения эффективности ТАПВ однократного действия допускается увеличивать его выдержку времени (по возможности с учетом работы потребителя).
3.3.8. На одиночных линиях 110 кВ и выше с односторонним питанием, для которых допустим в случае неуспешного ТАПВ переход на длительную работу двумя фазами, следует предусматривать ТАПВ двукратного действия на питающем конце линии. Перевод линии на работу двумя фазами может производиться персоналом на месте или при помощи телеуправления.
Для перевода линии после неуспешного АПВ на работу двумя фазами следует предусматривать пофазное управление разъединителями или выключателями на питающем и приемном концах линии.
При переводе линии на длительную работу двумя фазами следует при необходимости принимать меры к уменьшению помех в работе линий связи из-за неполнофазного режима работы линии. С этой целью допускается ограничение мощности, передаваемой по линии в неполнофазном режиме (если это возможно по условиям работы потребителя).
В отдельных случаях при наличии специального обоснования допускается также перерыв в работе линии связи на время неполнофазного режима.
3.3.9. На линиях, отключение которых не приводит к нарушению электрической связи между генерирующими источниками, например на параллельных линиях с односторонним питанием, следует устанавливать устройства ТАПВ без проверки синхронизма.
3.3.10. На одиночных линиях с двусторонним питанием (при отсутствии шунтирующих связей) должен предусматриваться один из следующих видов трехфазного АПВ (или их комбинаций):
а) быстродействующее ТАПВ (БАПВ)
б) несинхронное ТАПВ (НАПВ);
в) ТАПВ с улавливанием синхронизма (ТАПВ УС).
Кроме того, может предусматриваться однофазное АПВ (ОАПВ) в сочетании с различными видами ТАПВ, если выключатели оборудованы пофазным управлением и не нарушается устойчивость параллельной работы частей энергосистемы в цикле ОАПВ.
Выбор видов АПВ производится, исходя из совокупности конкретных условий работы системы и оборудования с учетом указаний 3.3.11-3.3.15.
3.3.11. Быстродействующее АПВ, или БАПВ (одновременное включение с минимальной выдержкой времени с обоих концов), рекомендуется предусматривать на линиях по 3.3.10 для автоматического повторного включения, как правило, при небольшом расхождении угла между векторами ЭДС соединяемых систем. БАПВ может применяться при наличии выключателей, допускающих БАПВ, если после включения обеспечивается сохранение синхронной параллельной работы систем и максимальный электромагнитный момент синхронных генераторов и компенсаторов меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины.
Оценка максимального электромагнитного момента должна производиться для предельно возможного расхождения угла за время БАПВ. Соответственно запуск БАПВ должен производиться лишь при срабатывании быстродействующей защиты, зона действия которой охватывает всю линию. БАПВ должно блокироваться при срабатывании резервных защит и блокироваться или задерживаться при работе УРОВ.
Если для сохранения устойчивости энергосистемы при неуспешном БАПВ требуется большой объем воздействий от противоаварийной автоматики, применение БАПВ не рекомендуется.
3.3.12. Несинхронное АПВ (НАПВ) может применяться на линиях по 3.3.10 (в основном 110-220 кВ), если:
а) максимальный электромагнитный момент синхронных генераторов и компенсаторов, возникающий при несинхронном включении, меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины, при этом в качестве практических критериев оценки допустимости НАПВ принимаются расчетные начальные значения периодических составляющих токов статора при угле включения 180°;
б) максимальный ток через трансформатор (автотрансформатор) при угле включения 180° меньше тока КЗ на его выводах при питании от шин бесконечной мощности;
в) после АПВ обеспечивается достаточно быстрая ресинхронизация; если в результате несинхронного автоматического повторного включения возможно возникновение длительного асинхронного хода, должны применяться специальные мероприятия для его предотвращения или прекращения.
При соблюдении этих условий НАПВ допускается применять также в режиме ремонта на параллельных линиях.
При выполнении НАПВ необходимо принять меры по предотвращению излишнего срабатывания защиты. С этой целью рекомендуется, в частности, осуществлять включение выключателей при НАПВ в определенной последовательности, например выполнением АПВ с одной из сторон линии с контролем наличия напряжения на ней после успешного ТАПВ с противоположной стороны.
3.3.13. АПВ с улавливанием синхронизма может применяться на линиях по 3.3.10 для включения линии при значительных (примерно до 4%) скольжениях и допустимом угле.
Возможно также следующее выполнение АПВ. На конце линии, который должен включаться первым, производится ускоренное ТАПВ (с фиксацией срабатывания быстродействующей защиты, зона действия которой охватывает всю линию) без контроля напряжения на линии (УТАПВ БК) или ТАПВ с контролем отсутствия напряжения на линии (ТАПВ ОН), а на другом ее конце - ТАПВ с улавливанием синхронизма. Последнее производится при условии, что включение первого конца было успешным (это может быть определено, например, при помощи контроля наличия напряжения на линии).
Для улавливания синхронизма могут применяться устройства, построенные по принципу синхронизатора с постоянным углом опережения.
Устройства АПВ следует выполнять так, чтобы имелась возможность изменять очередность включения выключателей по концам линии.
При выполнении устройства АПВ УС необходимо стремиться к обеспечению его действия при возможно большей разности частот. Максимальный допустимый угол включения при применении АПВ УС должен приниматься с учетом условий, указанных в 3.3.12. При применении устройства АПВ УС рекомендуется его использование для включения линии персоналом (полуавтоматическая синхронизация).
3.3.14. На линиях, оборудованных трансформаторами напряжения, для контроля отсутствия напряжения (КОН) и контроля наличия напряжения (КНН) на линии при различных видах ТАПВ рекомендуется использовать органы, реагирующие на линейное (фазное) напряжение и на напряжения обратной и нулевой последовательностей. В некоторых случаях, например на линиях без шунтирующих реакторов, можно не использовать напряжение нулевой последовательности.
3.3.15. Однофазное автоматическое повторное включение (ОАПВ) может применяться только в сетях с большим током замыкания на землю. ОАПВ без автоматического перевода линии на длительный неполнофазный режим при устойчивом повреждении фазы следует применять:
а) на одиночных сильно нагруженных межсистемных или внутрисистемных линиях электропередачи;
б) на сильно нагруженных межсистемных линиях 220 кВ и выше с двумя и более обходными связями при условии, что отключение одной из них может привести к нарушению динамической устойчивости энергосистемы;
в) на межсистемных и внутрисистемных линиях разных классов напряжения, если трехфазное отключение линии высшего напряжения может привести к недопустимой перегрузке линий низшего напряжения с возможностью нарушения устойчивости энергосистемы;
г) на линиях, связывающих с системой крупные блочные электростанции без значительной местной нагрузки;
д) на линиях электропередачи, где осуществление ТАПВ сопряжено со значительным сбросом нагрузки вследствие понижения напряжения.
Устройство ОАПВ должно выполняться так, чтобы при выводе его из работы или исчезновении питания автоматически осуществлялся перевод действия защит линии на отключение трех фаз помимо устройства.
Выбор поврежденных фаз при КЗ на землю должен осуществляться при помощи избирательных органов, которые могут быть также использованы в качестве дополнительной быстродействующей защиты линии в цикле ОАПВ, при ТАПВ, БАПВ и одностороннем включении линии оперативным персоналом.
Выдержка временем ОАПВ должна отстраиваться от времени погасания дуги и деионизации среды в месте однофазного КЗ в неполнофазном режиме с учетом возможности неодновременного срабатывания защиты по концам линии, а также каскадного действия избирательных органов.
3.3.16. На линиях по 3.3.15 ОАПВ должно применяться в сочетании с различными видами ТАПВ. При этом должна быть предусмотрена возможность запрета ТАПВ во всех случаях ОАПВ или только при неуспешном ОАПВ. В зависимости от конкретных условий допускается осуществление ТАПВ после неуспешного ОАПВ. В этих случаях предусматривается действие ТАПВ сначала на одном конце линии с контролем отсутствия напряжения на линии и с увеличенной выдержкой времени.
3.3.17. На одиночных линиях с двусторонним питанием, связывающих систему с электростанцией небольшой мощности, могут применяться ТАПВ с автоматической самосинхронизацией (АПВС) гидрогенераторов для гидроэлектростанций и ТАПВ в сочетании с делительными устройствами - для гидро- и теплоэлектростанций.
3.3.18. На линиях с двусторонним питанием при наличии нескольких обходных связей следует применять:
1) при наличии двух связей, а также при наличии трех связей, если вероятно одновременное длительное отключение двух из этих связей (например, двухцепной линии):
несинхронное АПВ (в основном для линий 110-220 кВ и при соблюдении условий, указанных в 3.3.12, но для случая отключения всех связей);
АПВ с проверкой синхронизма (при невозможности выполнения несинхронного АПВ по причинам, указанным в 3.3.12, но для случая отключения всех связей).
Для ответственных линий при наличии двух связей, а также при наличии трех связей, две из которых - двухцепная линия, при невозможности применения НАПВ по причинам, указанным в 3.3.12, разрешается применять устройства ОАПВ, БАПВ или АПВ УС (см. 3.3.11, 3.3.13, 3.3.15). При этом устройства ОАПВ и БАПВ следует дополнять устройством АПВ с проверкой синхронизма;
2) при наличии четырех и более связей, а также при наличии трех связей, если в последнем случае одновременное длительное отключение двух из этих связей маловероятно (например, если все линии одноцепные), - АПВ без проверки синхронизма.
3.3.19. Устройства АПВ с проверкой синхронизма следует выполнять на одном конце линии с контролем отсутствия напряжения на линии и с контролем наличия синхронизма, на другом конце - только с контролем наличия синхронизма. Схемы устройства АПВ с проверкой синхронизма линии должны выполняться одинаковыми на обоих концах с учетом возможности изменения очередности включения выключателей линии при АПВ.
Рекомендуется использовать устройство АПВ с проверкой синхронизма для проверки синхронизма соединяемых систем при включении линии персоналом.
3.3.20. Допускается совместное применение нескольких видов трехфазного АПВ на линии, например БАПВ и ТАПВ с проверкой синхронизма. Допускается также использовать различные виды устройств АПВ на разных концах линии, например УТАПВ БК (см. 3.3.13) на одном конце линии и ТАПВ с контролем наличия напряжения и синхронизма на другом.
3.3.21. Допускается сочетание ТАПВ с неселективными быстродействующими защитами для исправления неселективного действия последних. В сетях, состоящих из ряда последовательно включенных линий, при применении для них неселективных быстродействующих защит для исправления их действия рекомендуется применять поочередное АПВ; могут также применяться устройства АПВ с ускорением защиты до АПВ или с кратностью действия (не более трех), возрастающей по направлению к источнику питания.
3.3.22. При применении трехфазного однократного АПВ линий, питающих трансформаторы, со стороны высшего напряжения которых устанавливаются короткозамыкатели и отделители, для отключения отделителя в бестоковую паузу время действия устройства АПВ должно быть отстроено от суммарного времени включения короткозамыкателя и отключения отделителя. При применении трехфазного АПВ двукратного действия (см. 3.3.6) время действия АПВ в первом цикле по указанному условию не должно увеличиваться, если отключение отделителя предусматривается в бестоковую паузу второго цикла АПВ.
Для линий, на которые вместо выключателей устанавливаются отделители, отключение отделителей в случае неуспешного АПВ в первом цикле должно производиться в бестоковую паузу второго цикла АПВ.
3.3.23. Если в результате действия АПВ возможно несинхронное включение синхронных компенсаторов или синхронных электродвигателей и если такое включение для них недопустимо, а также для исключения подпитки от этих машин места повреждения следует предусматривать автоматическое отключение этих синхронных машин при исчезновении питания или переводить их в асинхронный режим отключением АГП с последующим автоматическим включением или ресинхронизацией после восстановления напряжения в результате успешного АПВ.
Для подстанций с синхронными компенсаторами или синхронными электродвигателями должны применяться меры, предотвращающие излишние срабатывания АЧР при действии АПВ.
3.3.24. АПВ шин электростанций и подстанций при наличии специальной защиты шин и выключателей, допускающих АПВ, должно выполняться по одному из двух вариантов:
1) автоматическим опробованием (постановка шин под напряжение выключателем от АПВ одного из питающих элементов);
2) автоматической сборкой схемы; при этом первым от устройства АПВ включается один из питающих элементов (например, линия, трансформатор), при успешном включении этого элемента производится последующее, возможно более полное автоматическое восстановление схемы доаварийного режима путем включения других элементов. АПВ шин по этому варианту рекомендуется применять в первую очередь для подстанций без постоянного дежурства персонала.
При выполнении АПВ шин должны применяться меры, исключающие несинхронное включение (если оно является недопустимым).
Должна обеспечиваться достаточная чувствительность защиты шин на случай неуспешного АПВ.
3.3.25. На двухтрансформаторных понижающих подстанциях при раздельной работе трансформаторов, как правило, должны предусматриваться устройства АПВ шин среднего и низшего напряжений в сочетании с устройствами АВР; при внутренних повреждениях трансформаторов должно действовать АВР, при прочих повреждениях - АПВ (см. 3.3.42).
Допускается для двухтрансформаторной подстанции, в нормальном режиме которой предусматривается параллельная работа трансформаторов на шинах данного напряжения, устанавливать дополнительно к устройству АПВ устройство АВР, предназначенное для режима, когда один из трансформаторов выведен в резерв.
3.3.26. Устройствами АПВ должны быть оборудованы все одиночные понижающие трансформаторы мощностью более 1 MB·А на подстанциях энергосистем, имеющие выключатель и максимальную токовую защиту с питающей стороны, когда отключение трансформатора приводит к обесточению электроустановок потребителей. Допускается в отдельных случаях действие АПВ и при отключении трансформатора защитой от внутренних повреждений.
3.3.27. При неуспешном АПВ включаемого первым выключателем элемента, присоединенного двумя или более выключателями, АПВ остальных выключателей этого элемента, как правило, должно запрещаться.
3.3.28. При наличии на подстанции или электростанции выключателей с электромагнитным приводом, если от устройства АПВ могут быть одновременно включены два или более выключателей, для обеспечения необходимого уровня напряжения аккумуляторной батареи при включении и для снижения сечения кабелей цепей питания электромагнитов включения следует, как правило, выполнять АПВ так, чтобы одновременное включение нескольких выключателей было исключено (например, применением на присоединениях АПВ с различными выдержками времени).
Допускается в отдельных случаях (преимущественно при напряжении 110 кВ и большом числе присоединений, оборудованных АПВ) одновременное включение от АПВ двух выключателей.
3.3.29. Действие устройств АПВ должно фиксироваться указательными реле, встроенными в реле указателями срабатывания, счетчиками числа срабатываний или другими устройствами аналогичного назначения.
[ ПУЭ]Тематики
- высоковольтный аппарат, оборудование...
- релейная защита
- электроснабжение в целом
Обобщающие термины
Синонимы
Сопутствующие термины
- АПВ воздушных линий
- АПВ смешанных (кабельно-воздушных) линий
- двукратное АПВ
- неуспешное АПВ
- однократное АПВ
- трехкратное АПВ
- цикл АПВ
EN
- AR
- ARC
- auto-reclosing
- automatic reclosing
- automatic recluse
- autoreclosing
- autoreclosure
- reclose
- reclosing
- reclosure
DE
- automatische Wiedereinschaltung
- Kurzunterbrechung
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Wiedereinschaltung, automatische
FR
Русско-английский словарь нормативно-технической терминологии > автоматическое повторное включение
11 система рецептурного управления технологическим процессом
система рецептурного управления технологическим процессом
-
[Интент]Вообще, batch-процесс – это вид технологического процесса, который иногда противопоставляют непрерывному процессу. Иногда batch-процессы называют рецептурными процессами (или просто рецептами); эту терминологию мы и будем в дальнейшем использовать. Слово “batch” еще можно перевести как “партия продукции”, и это тоже относится к затрагиваемой теме, так как в результате рецептурного процесса производится партия продукции. Ладно, хватит путаницы – теперь по делу.
Раньше мы рассматривали технологические процессы, которые идут непрерывно в течение 24 часов в день, 7 дней в неделю, 365 дней в году. Хотя, на самом деле, раз в году делают плановый останов на несколько дней для выполнения ремонтных и других работ, но это происходит строго в соответствии с планом, и этому предшествуют значительные подготовительные работы. В другое же время остановка производства – это “чрезвычайное” происшествие. При этом отдельно взятая технологическая установка принимает участие в производстве одного вида продукции, а сам процесс идет по фиксированной технологической цепочке с неизменными настройками (уставками). Короче, все скучно, однообразно и весьма предсказуемо.
А теперь представим гипотетический пищевой цех по производству сока. При этом цех может производить несколько видов сока: яблочный, вишневый и апельсиновый, т.е. 3 вида продукции. Пусть сок производится из концентрированного сока в специальной емкости с мешалкой, где он тщательно смешивается с водой, а потом пастеризуется и идет на розлив (пакетирование).
Имеет ли смысл ставить для производства этих трех видов сока три производственные линии (по одной линии на каждый вид сока)? Было бы круто, но чрезвычайно дорого. Выход – использовать одну и ту же линию для выпуска разных видов продукции. При этом понятно, что и технологические параметры для производства различных соков будут заметно друг от друга отличаться. Например, вишневый концентрат нужно смешивать с водой гораздо дольше, чем яблочный, но пастеризовать его надо при меньшей температуре (я на самом деле этого не знаю - чисто предположение:)
Набор технологических параметров для производства определенного вида продукции называется рецептом (recipe). В нашем примере для сока это может быть: соотношение вода/концентрат, длительность и температура смешивания; температура пастеризации + другие параметры. В общем случае, рецепт также может содержать последовательность технологических операций, которые для различных видов продукции могут быть, строго говоря, разными. Хотя на практике, как правило, рецепт не подразумевает различающиеся технологические операции, а содержит всего лишь массив технологических уставок для того или иного продукта.
Рис. 1. Иллюстрация рецептурного управления на примере производства различных видов сока
Это все напоминает процесс приготовления еды на кухне, где мы оттачиваем рецепты разных блюд, но при этом используем одни и те же орудия (кастрюли, ножи, разделочные доски, плиту и т.д.)
Теперь попробуем дать характеристику batch-процессу:
1. На выходе несколько видов продукции.
2. При производстве разных видов продукции задействуется одно и то же технологическое оборудование.
3. Имеется множество рецептов.
4. Производство по “партиям”, которое может быть относительно легко и без последствий остановлено после завершения партии, а потом возобновлено.
Автоматизированное управление batch-процессом называется рецептурным управлением (batch control, или recipe control). Этот вид управления несколько специфичен, и требует от системы управления некоторой смекалки. Конечно, можно использовать для задач рецептурного управления обычные программные блоки, подходящие для управления непрерывным процессом, НО на практике это приводит к огромным трудностям (=головной боли) при попытке все это реализовать, используя стандартные подходы программирования. Поэтому многие производители АСУ ТП разработали специализированные batch-модули, которые адаптированы именно под рецептурные процессы. Эти модули могут выполняться на уровне ПЛК или на выделенном сервере batch. Иногда эти сервера, к тому же, резервируются. Также batch-модули дополняются специализированной средой разработки batch-программ, что сильно облегчает жизнь инженера.
На рисунке ниже в качестве примера приведена конфигурация верхнего уровня АСУ ТП SIMATIC PCS 7, оснащенной выделенным сервером batch.
Рис. 2. Структурная схема АСУ ТП с выделенным сервером batch
Перечислим основные обязанности системы batch-управления:
1. Ну, собственно, самая главная задача – хранение/загрузка рецептов и их выполнение в режиме реального времени ( batch process management).
2. Отслеживание, не занята ли технологическая установка выполнением другого рецепта. Если занята, то выделяется другая аналогичная установка для выполнения данного рецепта ( process unit allocation).
3. Формирование отчетов об изготовление партии продукции в задаваемой пользователем форме. Причем, требуются отчеты с возможностью отслеживания истории (ретроспективы) “прогона” партии по технологической цепочке ( reporting and batch tracking).
4. Расчет различных показателей эффективности производства, как, например: удельного времени простоя (в %), производительности (в л/c) технологической установки или полного времени изготовления партии продукции (в мин).
5. Планирование изготовления партий, что фактически подразумевает составление производственного расписания. Ну, это на самом деле ни одна система в полном объеме пока не реализует ( batch planning).
И еще несколько слов.
Как правило, пакет batch состоит из двух частей – операторской (клиентской) и исполняемой. Клиентская часть устанавливается на АРМы и всего лишь обеспечивает удобный операторский интерфейс. Клиентская часть, как правило, органично вписывается в общую операторскую среду, и работа с ней идет непосредственно из мнемосхем.
Исполняемая часть – это костяк системы. Именно она ответственна за автоматизированное выполнение задач рецептурного управления, описанных выше. Исполняемая часть прогружается в специальные серверы batch или в обычные ПЛК в зависимости от архитектуры АСУ ТП.
И еще. Существует международный стандарт ISA-88, специфицирующий batch-процессы, определяющий модель и философию рецептурного управления, а также стандартизирующий соответствующую терминологию. Документ тяжеловесный, и посему прочитан полностью мной не был. Тем не менее, в следующей части я попытаюсь более детально описать рецептурные системы с привязкой именно к стандарту ISA-88.[ http://kazanets.narod.ru/Batch_P1.htm]
Тематики
EN
Русско-английский словарь нормативно-технической терминологии > система рецептурного управления технологическим процессом
См. также в других словарях:
работа под управлением ПК — Режим, когда принтер может выводить полученные данные. [http://www.morepc.ru/dict/] Тематики информационные технологии в целом EN on line … Справочник технического переводчика
работа под управлением монитора — — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом EN monitor controlled operation … Справочник технического переводчика
Солисты Большого детского хора под управлением Виктора Попова — Эта страница информационный список. В этой статье описываются наиболее известные солисты Большого детского хора Всесоюзного радио и Центрального телевидения. Солисты перечислены по алфавиту фамилий. Для каждого приведён список песен, по которым… … Википедия
Работа — 9.2.5. Работа 9.2.5.1. Общие положения Для безопасной работы машины должны быть предусмотрены все необходимые защитные меры и блокировки безопасности (см. 9.3). Должны быть приняты меры по ограничению движения машины в неуправляемом режиме после… … Словарь-справочник терминов нормативно-технической документации
автономная работа (принтера) — автономная работа Режим работы принтера, когда он может получать данные, но не может печатать. Если требуется печатать, надо переключить принтер в режим работы под управлением ПК (On line) [http://www.morepc.ru/dict/] Тематики информационные… … Справочник технического переводчика
Аполлон-15 (работа на Луне) — Приложение к статье Аполлон 15 Лунный модуль «Аполлона 15» «Фалкон» (англ. Falcon сокол) совершил посадку на юго восточной окраине Моря Дождей, у отрогов лунных Апеннин, вблизи каньона Хэдли Рилл. Астронавты Дэвид Скотт (командир… … Википедия
Театр под руководством С. Э. Радлова — Театр имени Ленинградского Совета … Википедия
Психологическая работа в органах и войсках пограничной службы — Является составной частью морально психологического обеспечения служебно боевой деятельности органов и войск ФПС России. Представляет собой комплекс информационно диагностических, аналитико прогностических, сопроводительных и реабилитационных… … Энциклопедия современной юридической психологии
Замбриборщ Федор Сергеевич — Гидробиолог Родился Ф.С. Замбриборщ в селе Старая Ушица, Каменец Подольского района, Хмельницкой области 4 февраля 1913 г. В селе крестьян. В 1928 году закончил семилетнюю школу и поступил в Голозубинский зоотехникум. Закончил техникум в 1931… … Википедия
Замбриборщ, Фёдор Сергеевич — Фёдор Сергеевич Замбриборщ Дата рождения: 4 (17) февраля 1913(1913 02 17) Место рождения: с. Старая Ушица Каменец Подольский район Хмельницкая область Дата смерти: 17 мая 199 … Википедия
HP TouchPad — интернет планшет, выпускаемый компанией Hewlett Packard. Продажи устройства стартовали в США 1 июля 2011 года, 15 июля 2011 года в Канаде и некоторых европейских странах. Особенностью HP TouchPad является работа под управлением HP webOS.… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на английский
с английского на русский- С английского на:
- Русский
- С русского на:
- Все языки
- Английский
- Итальянский
- Немецкий
- Французский